Avaliação dos Modelos Matemáticos de Motoneurônios de Vertebrados
Proposto em Dai et al.[1]
FRANCO, L. B. A.,1 E
VIEIRA, M. F.2
1Escola de Engenharia Elétrica e da
Computação/UFG;2Faculdade de Educação Física/UFGl
lbatistaalmeida@yahoo.com.br, marcus@fef.ufg.br
Palavras-Chave: Motoneurônios, modelos matemáticos,
simulação de sistemas biológicos.
INTRODUÇÃO
O motoneurônio, neurônio
motor, localiza-se no final das vias eferentes. Sua função é “traduzir” os
impulsos elétricos recebidos de centros superiores e da periferia nervosa em
comandos aos músculos.
Conhecer a “linguagem”
por meio da qual o motoneurônio comanda os músculos é de capital importância,
envolvendo o conhecimento das propriedades estáticas e dinâmicas do
motoneurônio enquanto célula excitável [2]. O desenvolvimento de modelos
matemáticos fornece importantes contribuições na elucidação desta “linguagem”,
levantando dados para a compreensão da relação entre as características
biofísicas e morfológicas dos motoneurônios.
Neste
aspecto, foram desenvolvidos novos modelos de motoneurônios de vertebrados [3],
[4], [5] e [6], um para cada tipo de motoneurônio, tipo S, FR e FF, conforme a
unidade motora da qual faz parte.
Estes
modelos, concebidos de forma a ser mais genérico possível, são capazes de
reproduzir as características estáticas e dinâmicas dos motoneurônios, levando
em conta tanto sua geometria, quanto suas propriedades ativas.
Para a
validação e melhoria destes novos modelos é importante estudar o comportamento
dinâmico de modelos já existentes na literatura, que fornecerão subsídios para
implementar e melhorar novas características aos novos modelos, conferindo-lhes
maior confiabilidade.
O trabalho
em desenvolvimento consiste na análise do modelo, tipo S, proposto por Daí et
al. [1] que construiu três modelos correspondentes aos três tipos biofísicos de
motoneurônios (Tipo S. FR e FF) com propriedades desejadas próximas àquelas obtidas
experimentalmente.
METODOLOGIA
A área de
atuação da pesquisa deste projeto é a Bioengenharia, entendida como sub-área da
Engenharia Biomédica, sendo identificada, portanto, como pesquisa básica
relativa ao Controle Motor, cuja metodologia é essencialmente a simulação em
computador de modelos neuronais, seja de células individuais ou de “pool” de células.
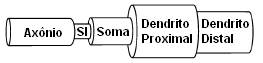 Figura
1 – Modelo de uma célula
Figura
1 – Modelo de uma célula
Os modelos
de motoneurônios de Daí et al. [1] são compostos por cinco compartimentos
cilíndricos (axônio, segmento inicial, soma, dendrito proximal e dendrito
distal) de tamanhos desiguais, similares às estruturas anatômicas simplificadas
de motoneurônios reais (figura 1). As propriedades
passivas da membrana dos modelos foram baseadas em dados de motoneurônios
espinhais de gato. As condutâncias são as seguintes: sódio rápido (gNa),
sódio persistente (gNaP), potássio delayed rectifier (gK(DR)), corrente-A (gK(A)),
potássio dependente de cálcio (gK(AHP)), T-tipo cálcio (gCa,T),
L-tipo cálcio (gCa,L), N-tipo cálcio (gCa,N), corrente-h
(gh) e de potássio de fuga (gleak).
O modelo, tipo S,
proposto por Daí et al. [1] foi implementado em linguagem C++ e simulados em
ambiente Windows assegurando um tempo de simulação relativamente curto. Assim, avaliamos as seguintes propriedades
passivas:
Parâmetros do P.A. (potencial
de ação) → Um potencial de ação é disparado por
um curto pulso de corrente (1,0 ms) de 15 nA e o pico do P.A. e o tempo até o
retorno ao potencial de repouso são avaliados.
Parâmetros da AHP (after-hiperpolarization)
→ Um
potencial de ação é disparado por um curto pulso de corrente (1,0 ms) de 15 nA
e o pico da AHP e o tempo de duração são avaliados.
RESULTADOS
Esse trabalho está em andamento e alguns dos
resultados preliminares são apresentados a seguir:
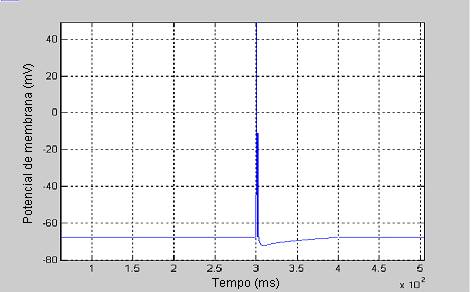
Figura 2 –
Potencial de ação ortodrômico.
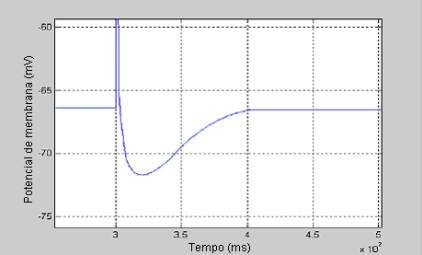
Figura 3 – AHP
(Pós-hiperpolarização)
As figuras - 2 e 3 - foram obtidas
pela injeção de um pulso de corrente de 15 nA e 1,0 ms de duração no soma após
300 ms do início da simulação. Motoneurônio tipo S
|
Tabela 1
– Propriedades da membrana do Motoneurônio tipo S |
|
|
Pico do
P.A. (mV) |
48,00 |
|
Largura
do P.A. (ms) |
3,00 |
|
Duração
da AHP (ms) |
100,00 |
|
Amplitude
da AHP (mV) |
5,70 |
|
Potencial
de repouso (mV) |
66,40 |
O trabalho publicado por Daí et al. [1]
não esclarece porque apenas a corrente ICa,N foi incluída no cálculo
da [Ca+2], desconsiderando as outras correntes de cálcio ICa,L
e ICa,T. Além disso, o trabalho apresenta equações transcritas
erroneamente com potenciais de repouso ora em 0 mV, ora em -65 mV. Daí, a
grande dificuldade encontrada para reproduzir as simulações com o intuito de
validar mais precisamente o modelo. Ainda será investigada a curva f/I e a
constante de tempo de membrana do soma dos modelos. Posteriormente, o modelo
será validado em situações dinâmicas, nas quais a resposta em freqüência e a
curva de fase do modelo serão levantadas.
CONCLUSÃO
A validação
mais precisa do modelo matemático de motoneurônios proposto por Daí et al. [1],
avaliando seu comportamento biologicamente realísticos frente a dados
experimentais reportados na literatura, está em andamento a fim levantar
subsídios para superar as deficiências atuais e implementar novas
características dinâmicas.
Assim,
muitos fenômenos biofísicos relativos à fisiologia do motoneurônio poderão ser
estudados em uma base teórica, confirmando dados e hipóteses, fornecendo
importantes subsídios, apontando novos caminhos e levantando novas hipóteses
para a pesquisa experimental.
Referências
[1] Dai, Y.;
Jones, K.E.; Fedirchuk, B.; McCrea, D.A.; Jordan, L.M. A modelling study of
locomotion-induced hyperpolarization of voltage threshold in cat lumbar
motoneurones. Journal of Physiology, v. 544, n. 2, p. 521-536, 2002.
[2] Vieira, M.F. Novos
Modelos de Motoneurônios de Vertebrados. São Paulo, SP:USP, 2002. Tese de
Doutorado, Universidade de São Paulo, 2002. 304 p.
[3] Vieira,
M.F.; Kohn, A.F. The encoding of input currents by motoneurons in relation to
neuronal modelling. In: IV Neuronal Coding Workshop, 2001, Plymouth. Annals of IV Neuronal Coding Workshop,
Plymouth, 2001a, p.6-9.
[4] Vieira, M.F.; Kohn, A.F. Uma nova proposta para modelos
de motoneurônios de diferentes tamanhos. In: V Congresso Brasileiro de Redes
Neurais, 2001, Rio de Janeiro. Anais do V
Congresso Brasileiro de Redes Neurais, Rio de Janeiro, 2001b, p.127-132.
[5] Kohn,
A.F.; Vieira, M.F. Optimality in the encoding/decoding relations of
motoneurones and muscle units. BioSystems, v. 67, p. 113-119, 2002.
[6] Vieira, M.F.; Kohn, A.F. Novos Modelos de Motoneurônios
de Vertebrados. In: XVIII Congresso Brasileiro de Engenharia Biomédica, 2002,
São José dos Campos – SP. Anais do XVIII
Congresso Brasileiro de Engenharia Biomédica, São José dos Campos - SP,
2002. 1 CD-ROM.